|
Xiaoyu Chen I am Ph.D. student in at IIIS, Tsinghua University, I am fortunate to be advised by Prof. Jianyu Chen, and work closely with Dr. Li Zhao at Microsoft Research. Prior to that, I received dual bachelor's degrees in Computer Science and Technology and Economics (second degree) from Tsinghua University. My research has been recognized with awards including outstanding graduate student honors, outstanding undergraduate thesis award, and a national scholarship. |

|
ResearchMy research endeavors to develop human-like embodied agents, specializing in foundation models for embodied decision making and Reinforcement Learning. |
|
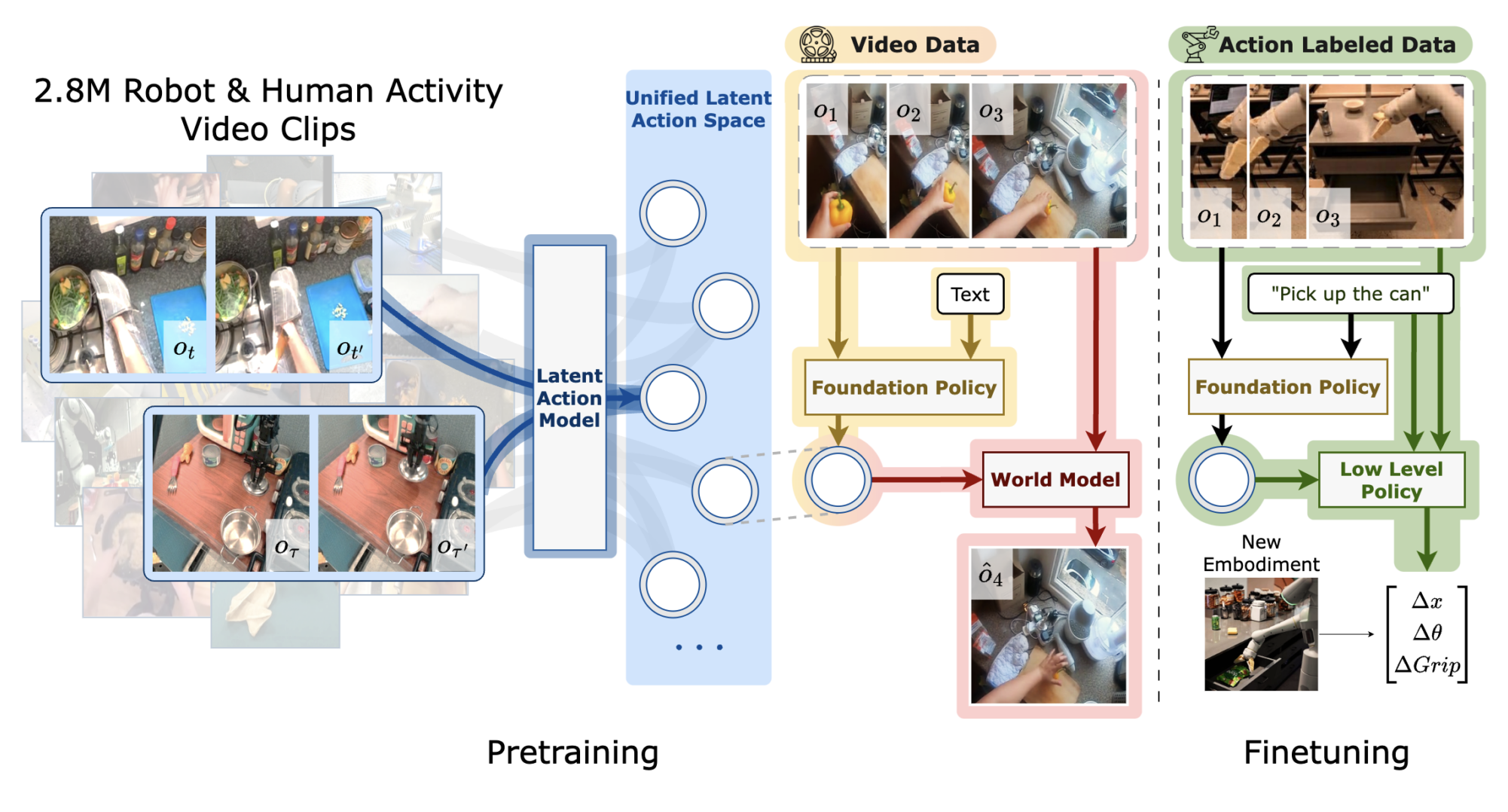
ViLLA-X: Enhancing Latent Action Modeling in VLAs
Xiaoyu Chen*, Hangxing Wei*, Pushi Zhang*, Chuheng Zhang*, Kaixin Wang*, Yanjiang Guo, Rushuai Yang, Yucen Wang, Xinquan Xiao, Li Zhao, Jianyu Chen, Jiang Bian Tech Report New! ViLLA-X bridges high-level planning and low-level execution via latent actions. |
|
IGOR: Image-GOal Representations are the Atomic Control Units for Foundation Models in Embodied AI
Xiaoyu Chen*, Junliang Guo*, Tianyu He*, Chuheng Zhang*, Pushi Zhang, Derek Cathera Yang, Li Zhao*, Jiang Bian Tech Report We introduce IGOR, a framework that learns latent actions from Internet-scale videos that enable cross-embodiment and cross-task generalization. |
|
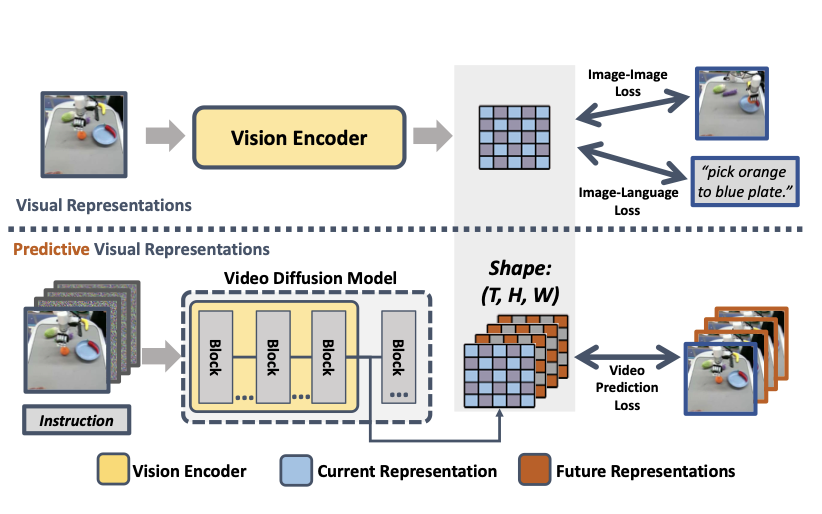
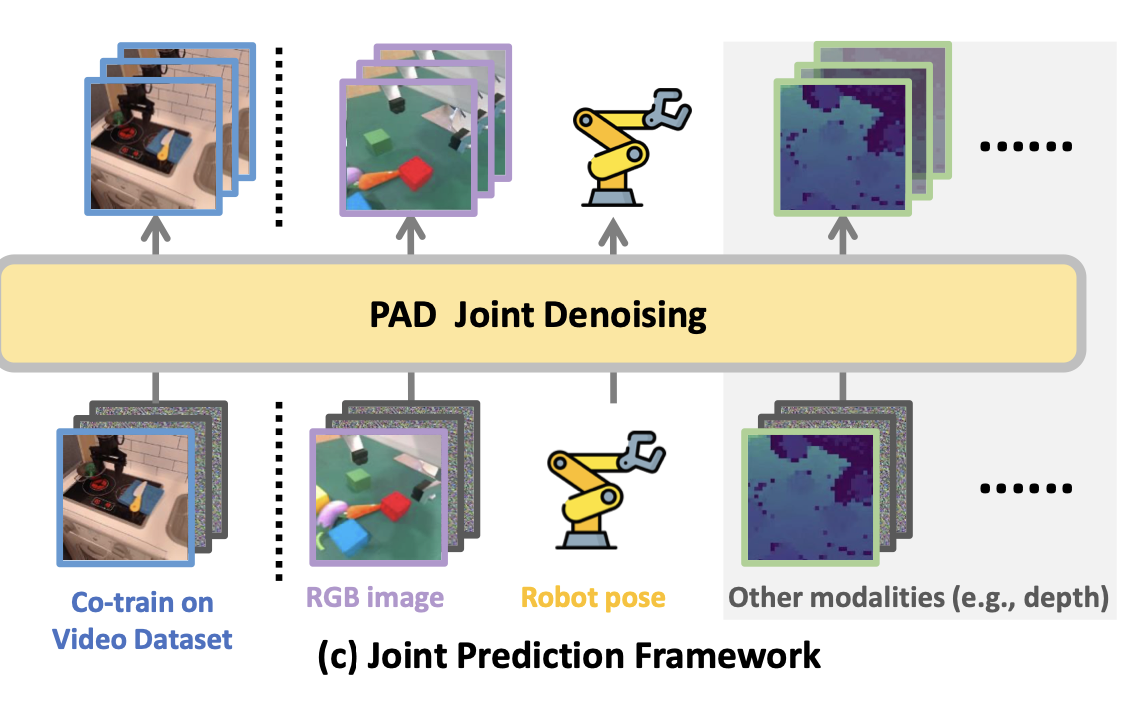
Video Prediction Policy: A Generalist Robot Policy with Predictive Visual Representations
Yucheng Hu*, Yanjiang Guo*, Pengchao Wang*, Xiaoyu Chen, Yen-Jen Wang, Jianke Zhang, Koushil Sreenath, Chaochao Lu, Jianyu Chen ICML 2025 Spotlight A novel framework to predict images and robot actions through joint dinoising process. |
|
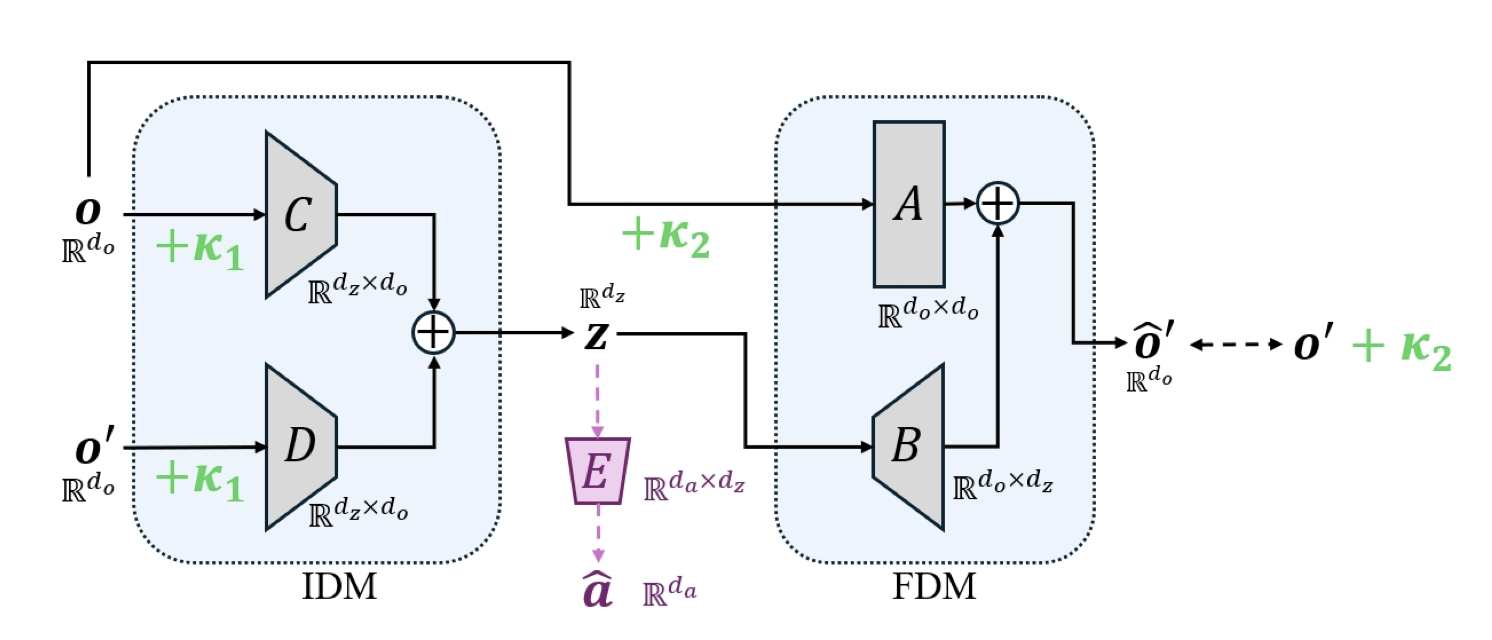
What Do Latent Action Models Actually Learn?
Chuheng Zhang, Tim Pearce, Pushi Zhang, Kaixin Wang, Xiaoyu Chen, Wei Shen, Li Zhao, Jiang Bian Preprint Do latents capture the changes caused by actions or irrelevant noise? |
|
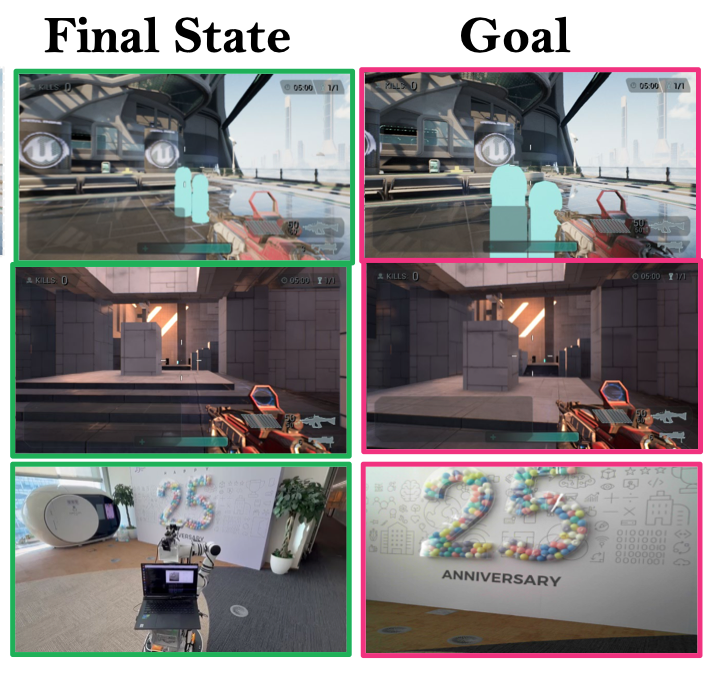
PIG-Nav: Key Insights for Pretrained Image Goal Navigation Models
Jiansong Wan, Chengming Zhou, Jinkua Liu, Xiangge Huang, Xiaoyu Chen, Xiaohan Yi, Qisen Yang, Baiting Zhu, Xin-Qiang Cai, Lixing Liu, Rushuai Yang, Chuheng Zhang, Sherif Abdelfattah, Hayong Shin, Pushi Zhang, Li Zhao, Jiang Bian Preprint A pretrained Image-Goal navigation model. |
|
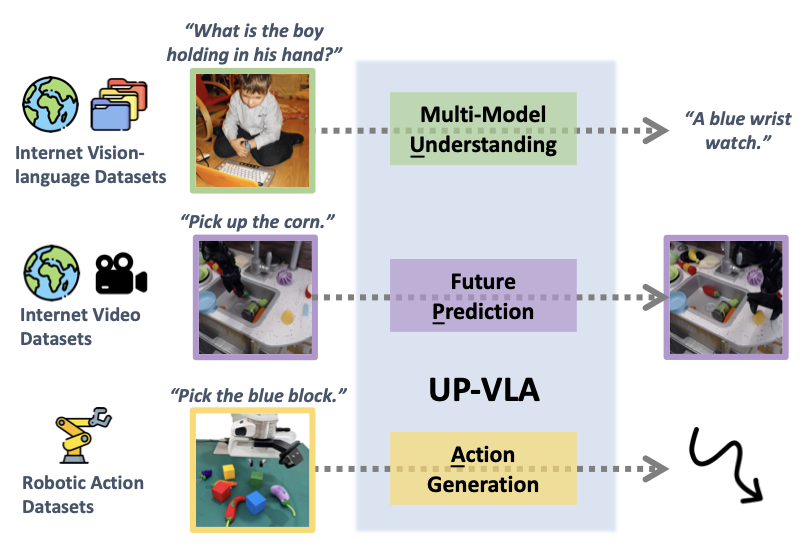
UP-VLA: A Unified Understanding and Prediction Model for Embodied Agent
Jianke Zhang, Yanjiang Guo, Yucheng Hu, Xiaoyu Chen, Xiang Zhu, Jianyu Chen ICML 2025 A VLA pretraining method with unified understanding and generalization objective. |
|
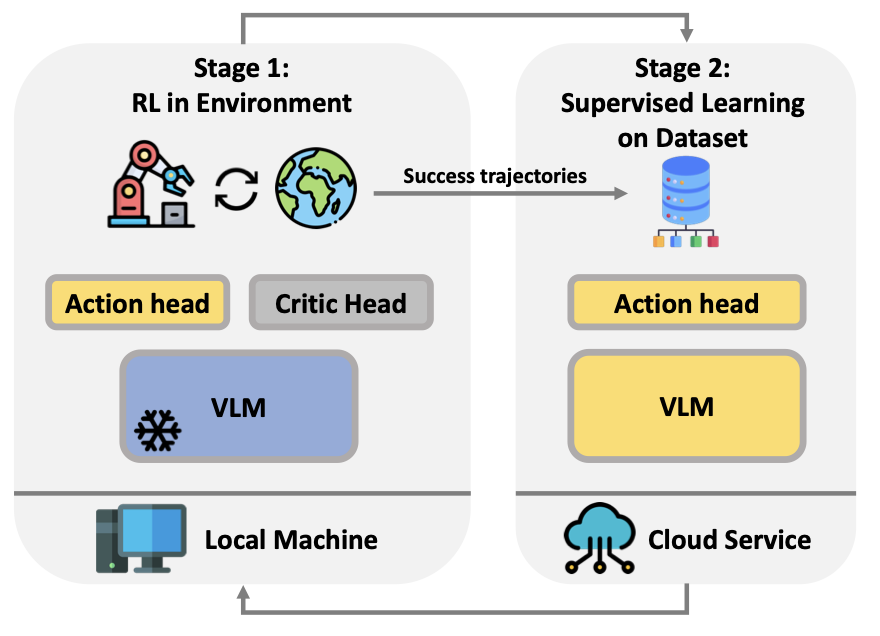
Improving Vision-Language-Action Model with Online Reinforcement Learning
Yanjiang Guo*, Jianke Zhang*, Xiaoyu Chen*, Xiang Ji, Yen-Jen Wang, Yucheng Hu, Jianyu Chen ICRA 2025 Improve VLA models during interaction with environments via online Reinforcement Learning. |
|
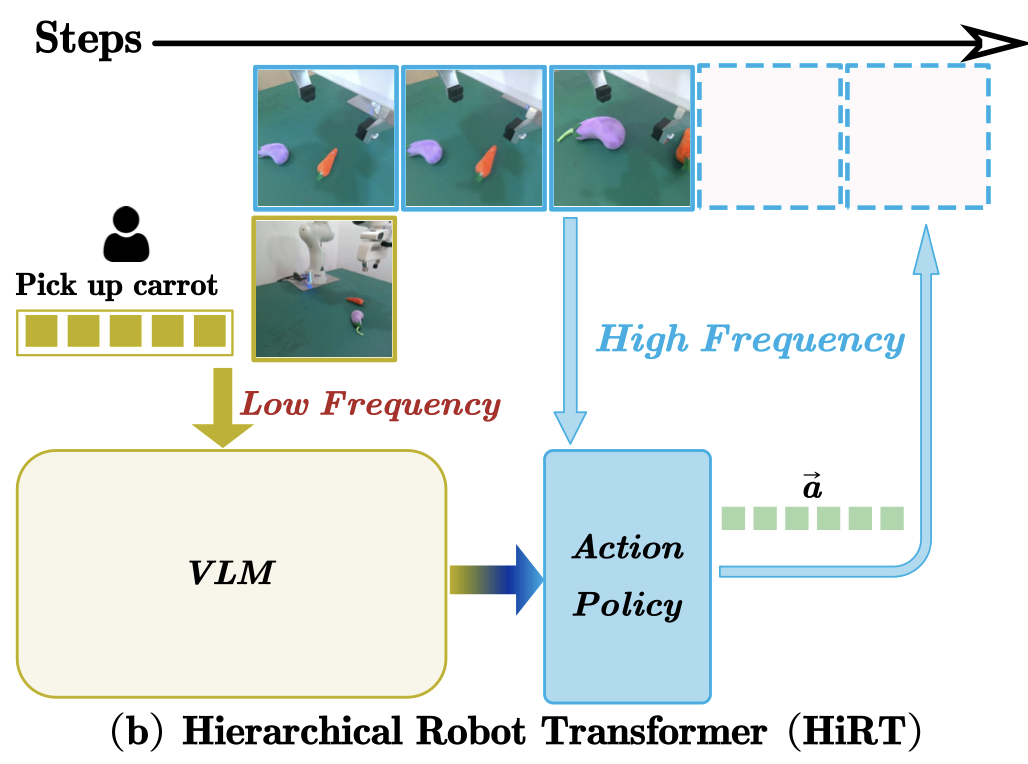
HiRT: Enhancing Robotic Control with Hierarchical Robot Transformers
Jianke Zhang, Yanjiang Guo, Xiaoyu Chen, Yen-Jen Wang, Yucheng Hu, Chengming Shi, Jianyu Chen CoRL 2024 A Hierarchical Robot Transformer framework that enables flexible frequency and performance trade-off. |
|
Prediction with Action: Visual Policy Learning via Joint Denoising Process
Yanjiang Guo, Yucheng Hu, Jianke Zhang, Yen-Jen Wang, Xiaoyu Chen, Chaochao Lu, Jianyu Chen NeurIPS 2024 A novel framework to predict images and robot actions through joint dinoising process. |
|
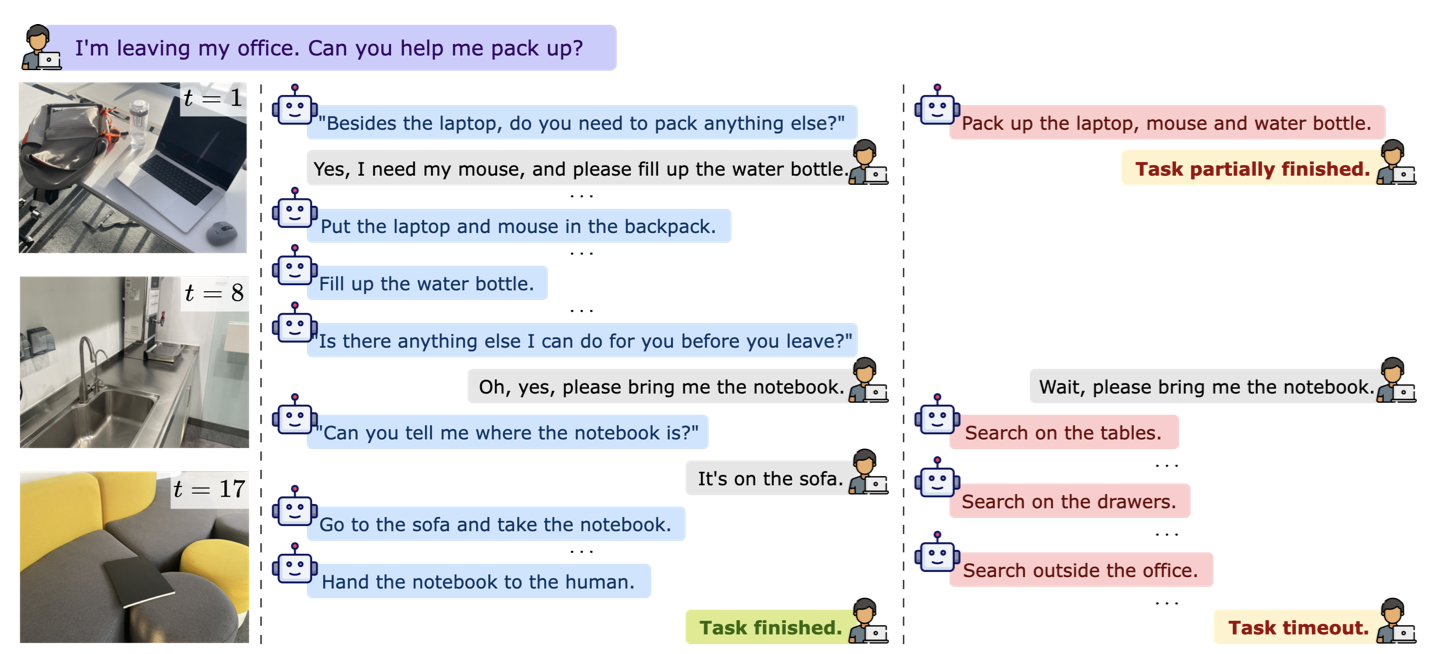
Asking Before Acting: Gather Information in Embodied Decision Making with Language Models
Xiaoyu Chen, Shenao Zhang, Pushi Zhang, Li Zhao, Jianyu Chen Preprint A simple yet effective method for embodied agents to proactively gather information before acting, minimizing unnecessary exploration and mistakes. |
|
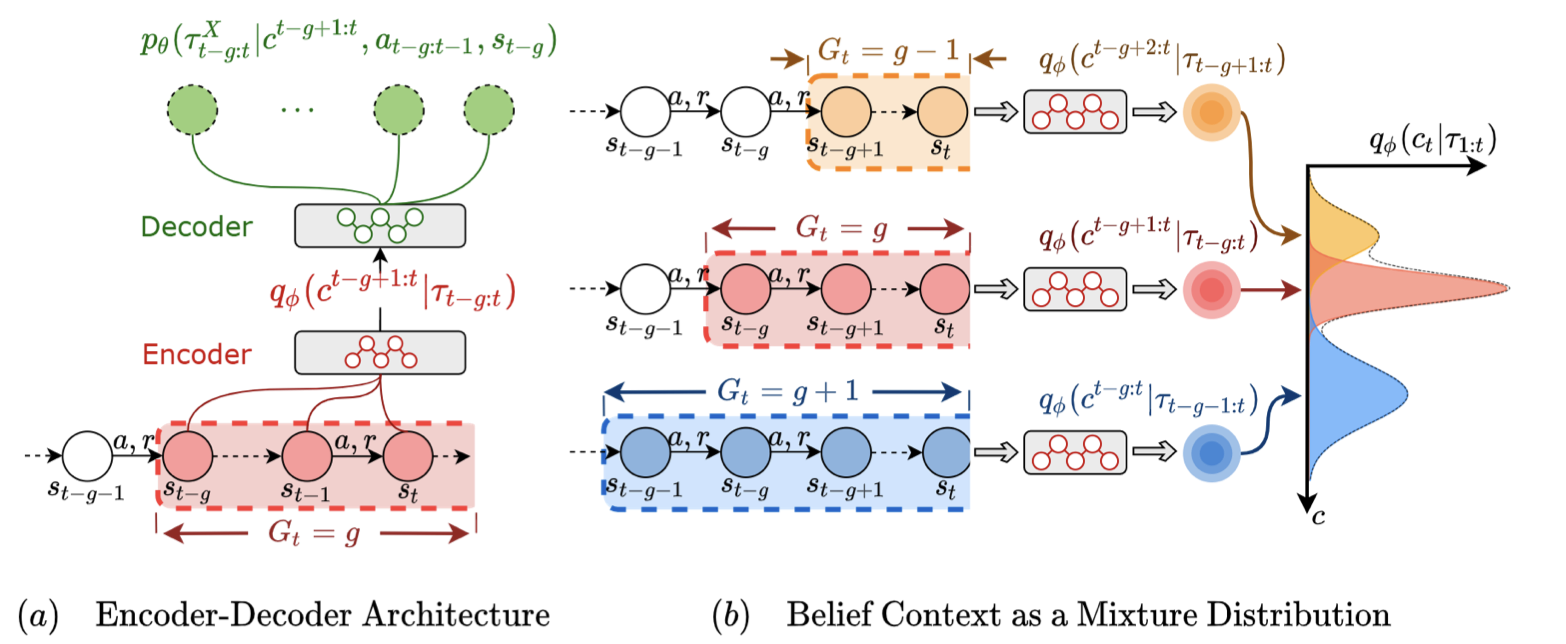
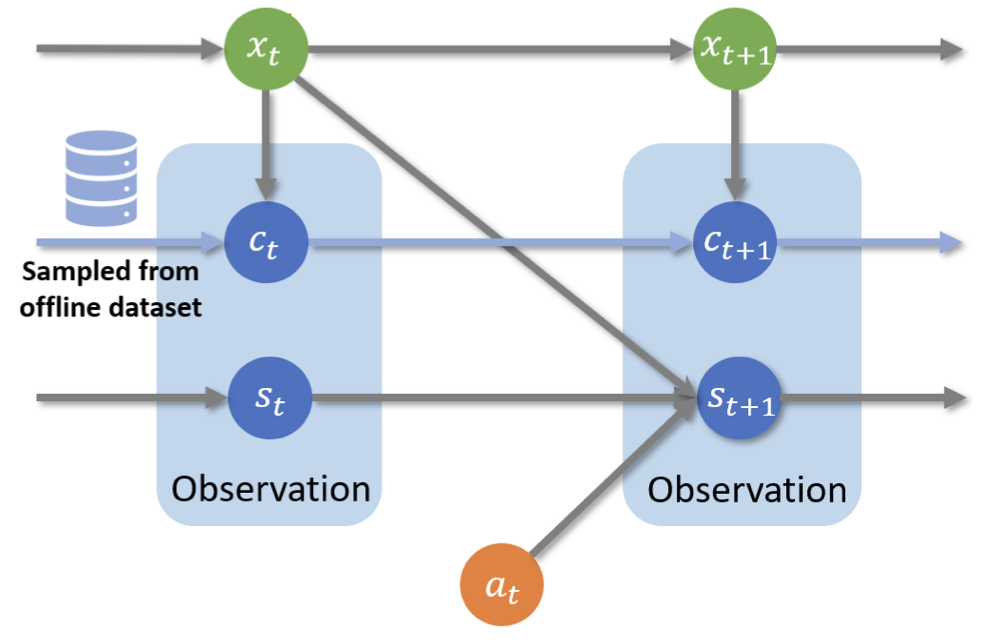
An Adaptive Deep RL Method for Non-Stationary Environments with Piecewise Stable Context
Xiaoyu Chen*, Xiangming Zhu*, Yufeng Zheng, Pushi Zhang, Li Zhao, Wenxue Cheng, Peng Cheng, Yongqiang Xiong, Tao Qin, Jianyu Chen, Tie-Yan Liu NeurIPS 2022 A new RL method (SeCBAD) for handling real-world situations where the environment changes abruptly within an episode , allowing agents to adapt to these context variations. |
|
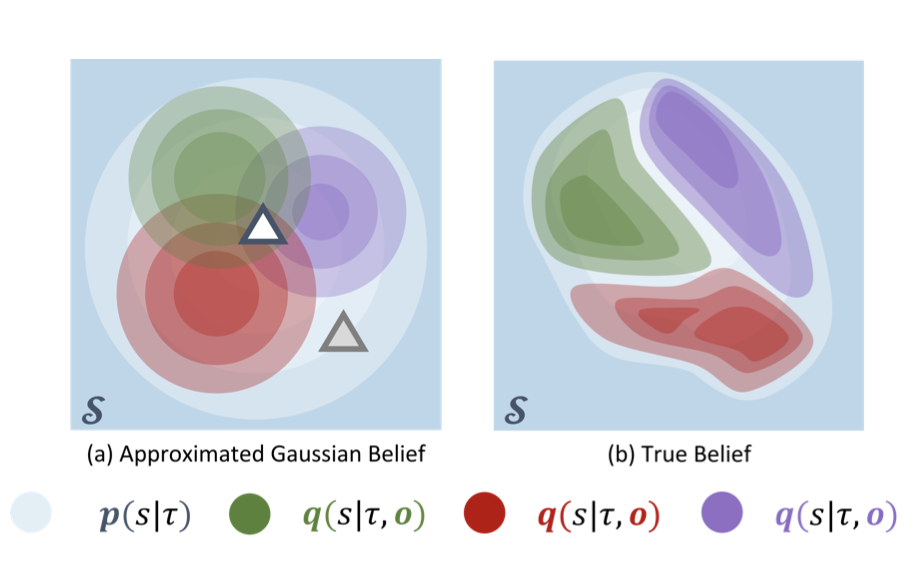
Flow-based Recurrent Belief State Learning for POMDPs
Xiaoyu Chen, Yao Mu, Ping Luo, Shengbo Li, Jianyu Chen ICML 2022 (Outstanding Undergraduate Thesis Award) A new method (FORBES) for learning general continuous belief states in POMDPs, enhances the performance of downstream RL algorithms by reducing approximation errors during state inference. |
|
Efficient and generalized end-to-end autonomous driving system with latent deep reinforcement learning and demonstrations
Zuojin Tang, Xiaoyu Chen, YongQiang Li, Jianyu Chen ECML PKDD 2025 EGADS: FORBES @ Autonomous Driving |
|
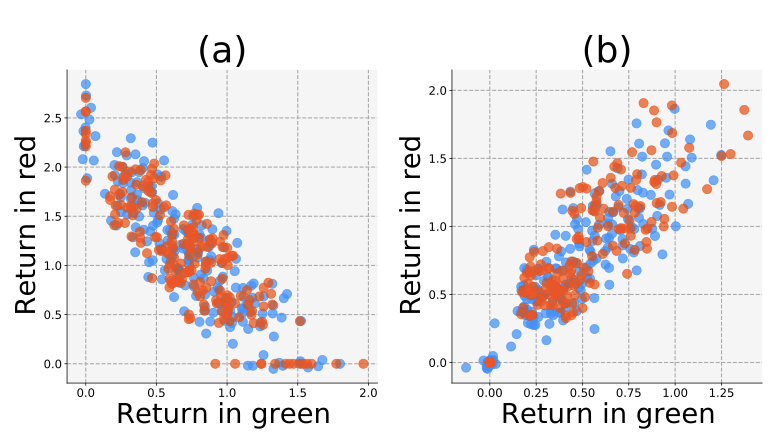
Distributional Reinforcement Learning for Multi-Dimensional Reward Functions
Pushi Zhang*, Xiaoyu Chen*, Li Zhao, Wei Xiong, Tao Qin, Tie-Yan Liu NeurIPS 2021 Model the joint return distribution across multiple reward sources in distributional RL, capturing both inherent randomness and rich correlations. |
|
Towards Generalizable Reinforcement Learning for Trade Execution
Chuheng Zhang, Yitong Duan, Xiaoyu Chen, Jianyu Chen, Jian Li, Li Zhao IJCAI 2023 Investigate and mitigate overfitting issues that arise when applying reinforcement learning to optimized trade execution. |
|
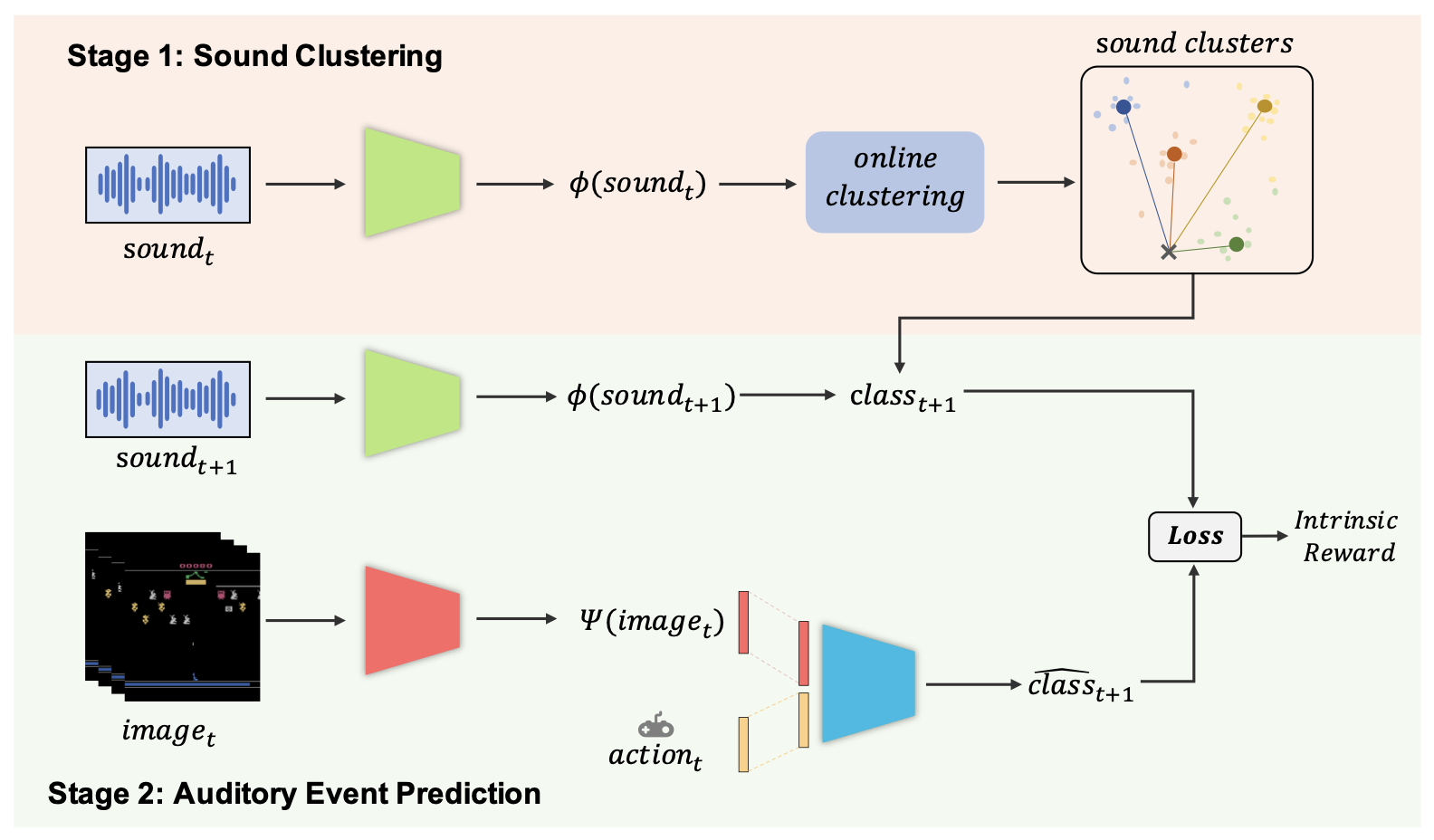
Noisy Agents: Self-supervised Exploration by Predicting Auditory Events
Chuang Gan*, Xiaoyu Chen*, Phillip Isola, Antonio Torralba, Joshua B. Tenenbaum IROS 2022 A novel type of intrinsic motivation that encourages the agent to understand the causal effect of its actions through auditory event prediction. |
|
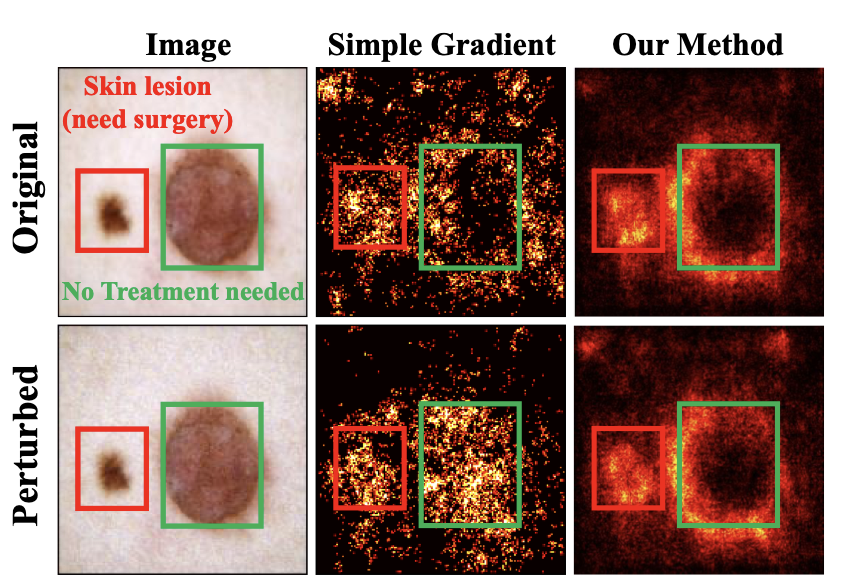
Certifiably Robust Interpretation via Renyi Differential Privacy
Ao Liu, Xiaoyu Chen, Sijia Liu, Lirong Xia, Chuang Gan AAAI 2023 journal track A new interpretation method for convolutional neural networks (CNNs) based on Rényi differential privacy. |
|
This website is taken from here. |